

Autokaamerate kasutamine autonoomses juhtimises
Tehnoloogia arenedes on autonoomne sõit järk-järgult muutunud kaasaegses ühiskonnas vältimatuks trendiks. Autonoomne sõit ei saa mitte ainult parandada liiklusohutust, vaid ka tõhusalt vähendada liiklusummikuid ja säästa energiat.
Autosisesed kaamerad on isejuhtiva auto peamine visuaalne andur ja see on ka küpse tehnoloogiaga "auto silm". Tahavaatekaamerad pilditeabe saamiseks töötlevad pärast pildi objektiivi poolt pildi kogumist fototundliku komponendi ahel ja kaamera juhtkomponent kujutist ja teisendavad selle digitaalseks signaaliks, mida saab arvuti töödelda, ning seejärel pilditeavet töödeldakse nägemise töötlemise kiibil algoritmi abil. Pärast tõhusa teabe väljavõtmist siseneb see otsustuskihti, et teha otsuseid ja otsustada, et tajuda ja hinnata sõidukit ümbritsevaid teeolusid. Sõidukile paigaldatud kaameratel on võimalus sihtmärke ära tunda. Kasutades pildituvastustehnoloogiat, suudavad isejuhtivad autod sõidu ajal täpselt eristada jalakäijaid, sõidukeid, liiklusmärke ja takistusi. Praegu kasutatakse neid peamiselt 360-kraadiste panoraampiltide, ettepoole kokkupõrke hoiatuste ja sõidurajalt kõrvalekaldumise hoiatuste puhul. jalakäijate tuvastamine ja muud ADAS-i funktsioonid.
Isejuhtivad autokaamerad koosnevad peamiselt kahest osast: tarkvarast ja riistvarast. Riistvarastruktuuri vaatenurgast on autokaamerate põhikomponentideks objektiiv, CMOS-pildiandur, DSP-digitaaltöötluskiip jne,
ja üldised komponendid on kokku pandud moodulite kaudu.
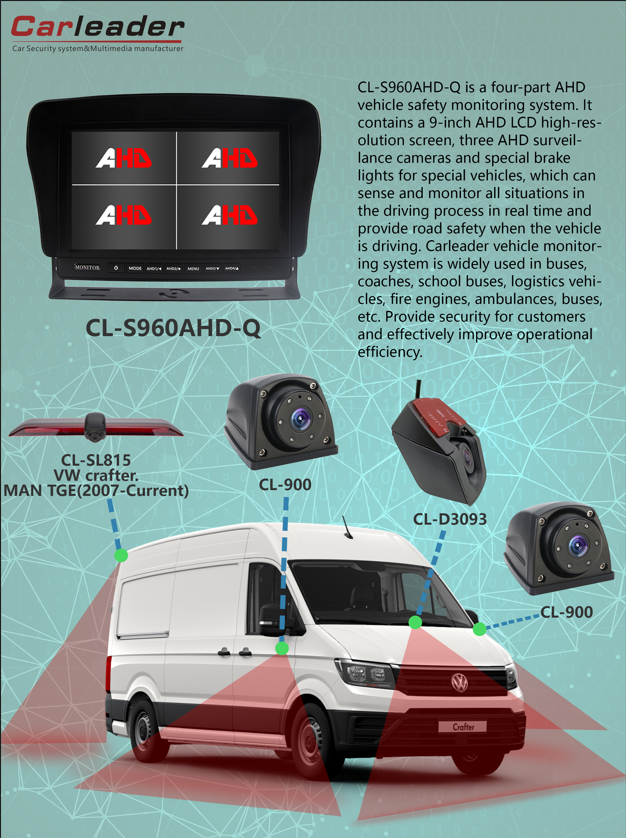
Vastavalt paigaldusasendile saab autokaamerad jagada eestvaateks, külgvaateks, tagantvaateks, sisseehitatud ja ruumivaateks jne.
Selle roll on järgmine:
⢠Esivaatekaamera: kasutatakse tavaliselt ADAS-i / autonoomse sõidu põhikaamerana, mis on paigaldatud auto esiklaasi kohale ja suudab tuvastada takistusi, sõiduraja jooni, äärekivisid, foore, liiklusmärke ja sõidualasid. tuvastada.
⢠Külgvaatekaamera: Külgvaatekaameratel on tavaliselt kolm paigaldusasendit, tahavaatepeegel, sõiduki B-piilar ja sõiduki tagumine poritiib, mida tavaliselt kasutatakse külgmiste takistuste jälgimiseks, pimeala jälgimiseks jne.
⢠Tahavaatekaamera: tavaliselt paigaldatud sõiduki pagasiruumi, seda saab kasutada parkimisabi funktsiooni realiseerimiseks.
⢠Ruumivaatekaamera: ruumilise vaate kaamerad paigaldatakse tavaliselt ümber sõiduki kere ja tavaliselt kasutatakse 360-kraadiste panoraampiltide tegemiseks, parkimiskoha jälgimiseks ja madala kiirusega tajufunktsioonide tegemiseks 4–8 kalasilmakaamerat.
⢠Sisseehitatud kaamera: levinumad paigalduskohad hõlmavad sõiduki A-piilari sisemust, roolil ja tahavaatepeegli juures, et jälgida selliseid funktsioone nagu lemmikloomade ja imikute jälgimine autos ning juhi väsimuse jälgimine.
Saada päring


X
Kasutame küpsiseid, et pakkuda teile paremat sirvimiskogemust, analüüsida saidi liiklust ja isikupärastada sisu. Seda saiti kasutades nõustute meie küpsiste kasutamisega.
Privaatsuspoliitika